Hi, I'm Owen!
I am an engineering student from San Francisco, California who is passionate about software, robotics, and AI. I have one and a half years of internship experience working on software for UAVs and autonomous robotics. I am highly motivated by solving real-world challenges, which is why I chose to study the field of mechatronics engineering at the University of Waterloo! In my free time, I am an avid guitar player. As a hobby, I also design and build my own electric guitars.
As a co-op student, I am always seeking to apply and expand my skills through internships! Here you can learn more about my skills, portfolio, and resume!

Languages
I have an ambition to not only use programming practically, but understand the computational theory behind many languages. I am proficient in many languages, and am constantly learning more.







Libraries/Frameworks
As someone working in the field of robotics and automation, I have worked with many industry-leading software frameworks that I can effectively work with and implement in a codebase.
Controls
As a robotics engineer, I have experience studying and implementing many aspects of modern control theory. I can confidently take control of robotic mechanisms to enable advanced automation.
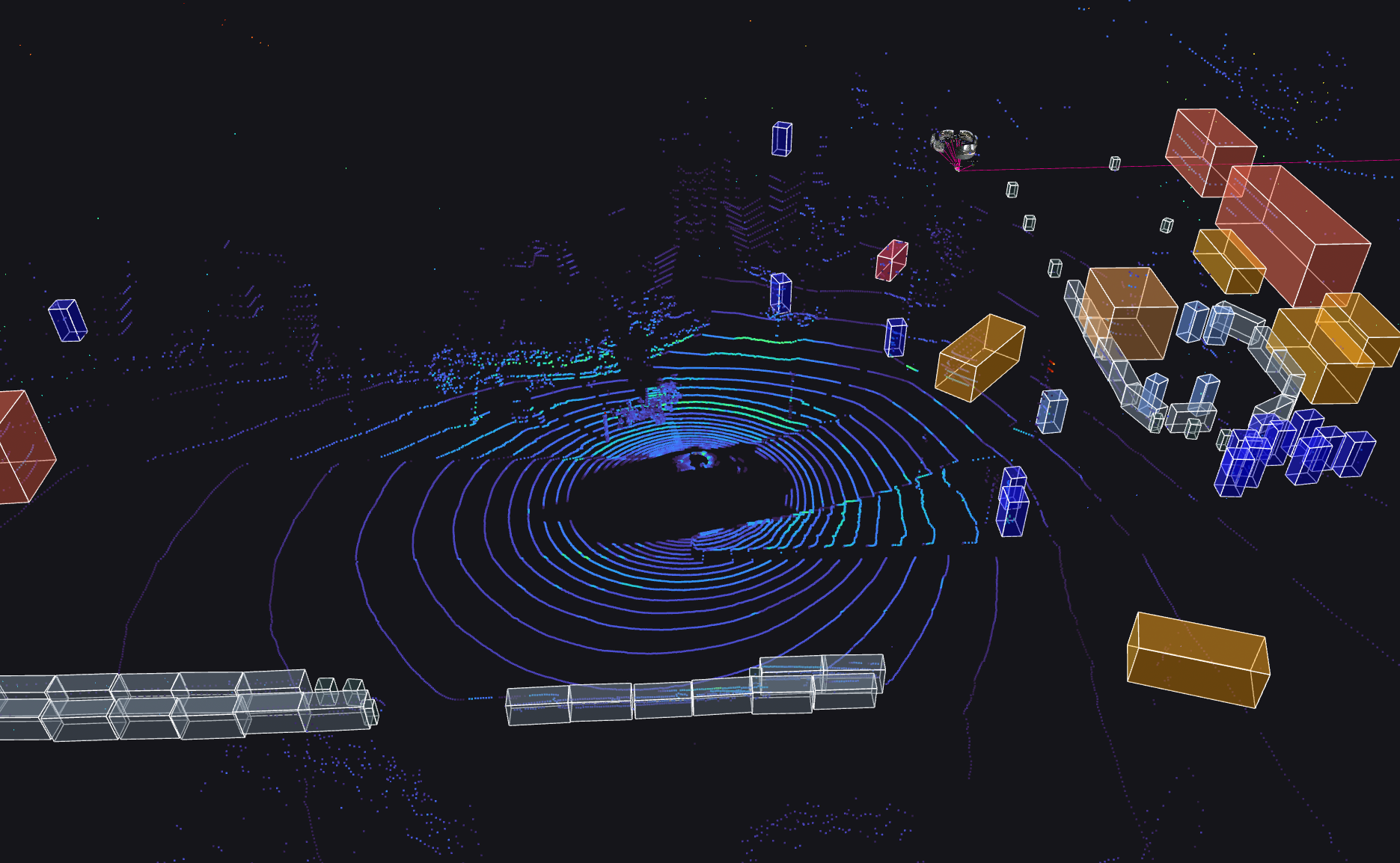
Visualization of nuScenes dataset used for testing and training on WATO
WATonomous
September 2022 - Present
- Developed C++ code using ROS2 within Docker infrastructure for an embedded autonomous vehicle utilizing cameras, LiDAR, and radar
- Implemented cutting-edge research in point cloud segmentation, motion prediction, and multi-agent simulation using Tensorflow and PyTorch
- Derived architecture for software including novel solutions for HD map navigation, LiDAR localization, and dynamic voxel grid mapping
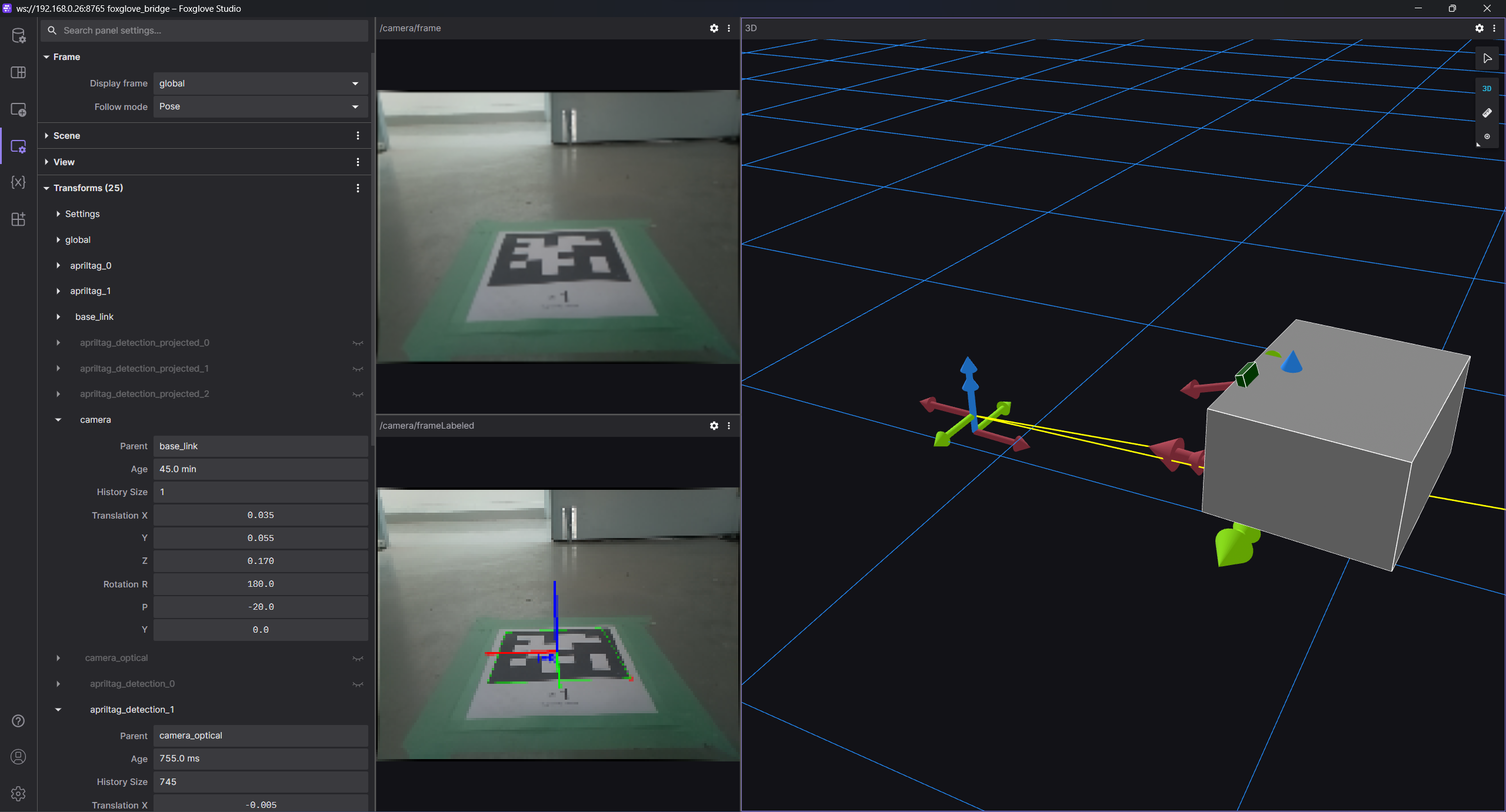
3D Localization from apriltags developed for QRS using ROS
Quantum Robotic Systems
January 2022 - April 2022
- Developed computer vision system using OpenCV for global pose localization within 1 cm
- Built ROS2 infrastructure for mobile robot platforms to increase target market and allow for vision, navigation, and advanced controls
- Implemented custom I2C and Serial protocol links between ESP32 and Raspberry Pi for ROS, vision, and logging
- Implemented PID control laws and dynamic motion profiling for robot subsystems to improve motion performance and tolerances by 80%
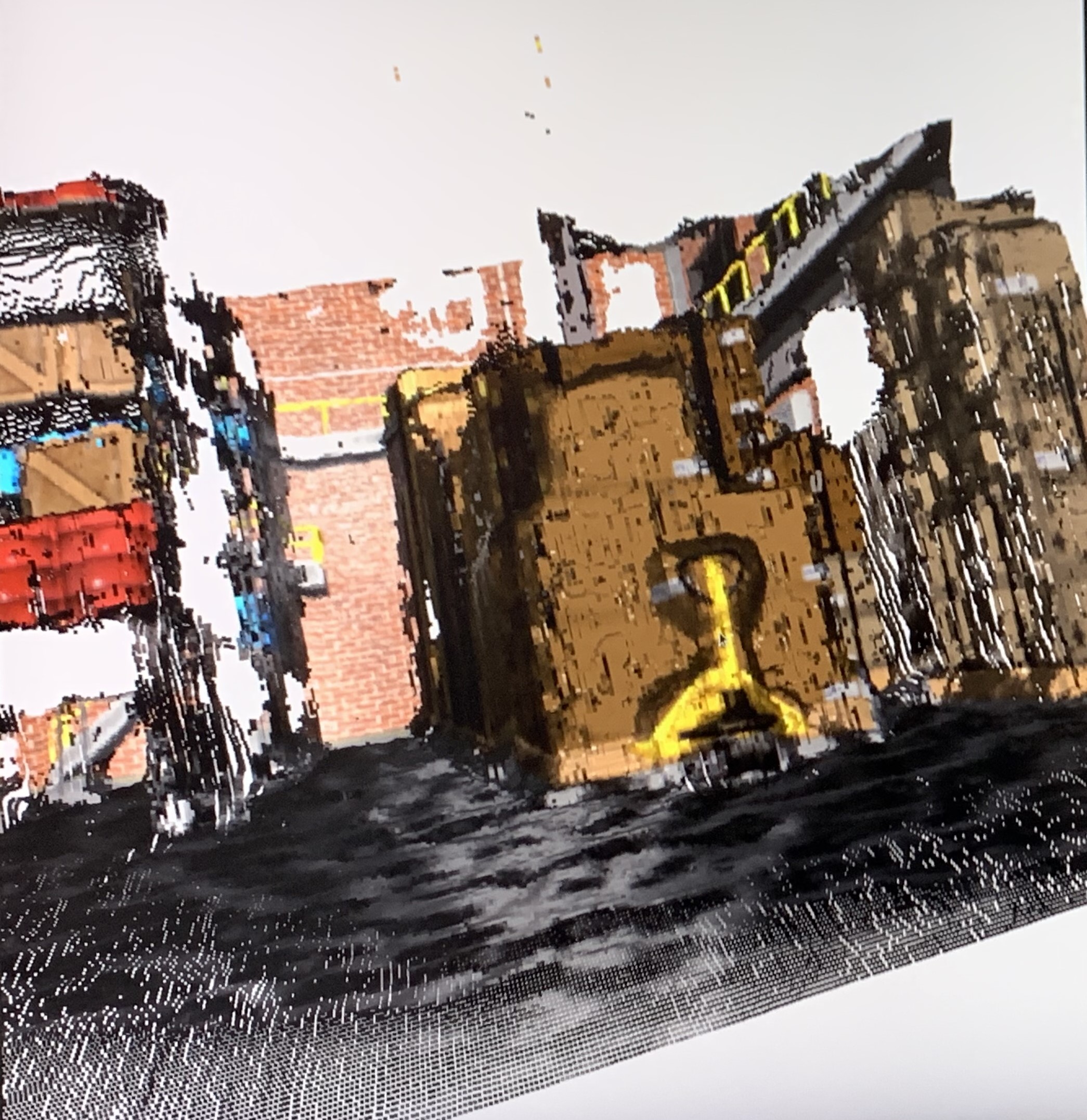
Point cloud alignment for stereoscopic vision-based SLAM developed for iMetalx
iMetalx
August 2021 - August 2022
- Implemented government standards in command and control messaging and tactical mesh networks for communication within a 25 km range
- Interfaced and integrated our software with other teams on multiple embedded UAS systems
- Created Hardware in The Loop simulator using Gazebo for testing and developing on UAV platforms
- Built application on ATAK (Android Team Awareness Kit) framework for government interoperability
- Developed embedded CPython interface for a native Kotlin application to run essential Python libraries on Android devices enabling wireless drone communication